 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Privacy Preservation for Robot Visual Perception
May 08, 2025Many robots (e.g., iRobot's Roomba) operate based on visual observations from live video streams, and such observations may inadvertently include privacy-sensitive objects, such as personal identifiers. Existing approaches for preserving privacy rely on deep learning models, differential privacy, or cryptography. They lack guarantees for the complete concealment of all sensitive objects. Guaranteeing concealment requires post-processing techniques and thus is inadequate for real-time video streams. We develop a method for privacy-constrained video streaming, PCVS, that conceals sensitive objects within real-time video streams. PCVS takes a logical specification constraining the existence of privacy-sensitive objects, e.g., never show faces when a person exists. It uses a detection model to evaluate the existence of these objects in each incoming frame. Then, it blurs out a subset of objects such that the existence of the remaining objects satisfies the specification. We then propose a conformal prediction approach to (i) establish a theoretical lower bound on the probability of the existence of these objects in a sequence of frames satisfying the specification and (ii) update the bound with the arrival of each subsequent frame. Quantitative evaluations show that PCVS achieves over 95 percent specification satisfaction rate in multiple datasets, significantly outperforming other methods. The satisfaction rate is consistently above the theoretical bounds across all datasets, indicating that the established bounds hold. Additionally, we deploy PCVS on robots in real-time operation and show that the robots operate normally without being compromised when PCVS conceals objects.
Design and Development of Underwater Vehicle: ANAHITA
Mar 01, 2019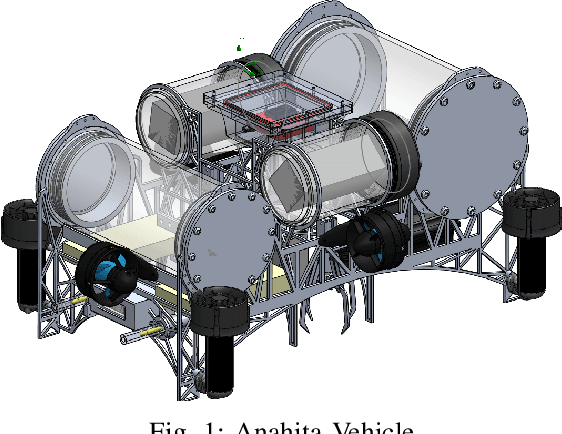
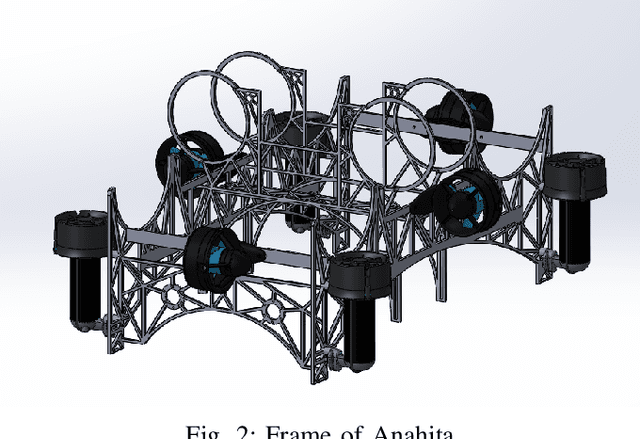
Anahita is an autonomous underwater vehicle which is currently being developed by interdisciplinary team of students at Indian Institute of Technology(IIT) Kanpur with aim to provide a platform for research in AUV to undergraduate students. This is the second vehicle which is being designed by AUV-IITK team to participate in 6th NIOT-SAVe competition organized by the National Institute of Ocean Technology, Chennai. The Vehicle has been completely redesigned with the major improvements in modularity and ease of access of all the components, keeping the design very compact and efficient. New advancements in the vehicle include, power distribution system and monitoring system. The sensors include the inertial measurement units (IMU), hydrophone array, a depth sensor, and two RGB cameras. The current vehicle features hot swappable battery pods giving a huge advantage over the previous vehicle, for longer runtime.